應用於微創脊椎手術之手持式輔助機器人
Handheld Assistive Robot for Minimally Invasive Spine Surgery
手持式手術機器人可維持醫師原有的操刀習慣,並在手術室佔用空間較小、不會受限於特定環境,具有靈活性及多元的應用性。本文從目前對手術機器人的普遍認知出發,針對微創脊椎手術之需求,介紹手持式手術機器人的組成結構與技術特點。最後通過實驗證明,手持機器人有能力協助醫生克服手部震顫,共同操作手術器械將植入物沿正確路徑進行固定。
The hand-held robot has the advantage that the surgeons maintain their original habit and it is flexible for multiple applications by occupying less space in operation room. In this article, starting from the current general cognition of surgical robots, we introduce the composition and technical characteristics of the hand-held surgical robot in view of the needs of minimally invasive spine surgery. Finally, it is proved by experiments that the handheld robot has the ability to assist surgeons to overcome hand tremors and jointly operate surgical instruments to fix the implants along the correct path.
一、現今對手術機器人的認知
在科幻作品中,常常出現病人躺進醫療倉中,即會有機器人對病患的狀態進行診斷評估並自動完成手術。然而,在現實中,自主作動的醫療機器人只在早期有過短暫地發展;其自動化的特性將醫師排除於整個手術流程之外,可能造成安全上疑慮,故而逐漸消失。現今所認為的機器人手術,不是由機器人去完成手術,而是成為醫師的助手,輔助性地進行手術。
現階段最著名的手術機器人具備以下特性:機器人坐落於手術檯旁、由醫師在主控平台遠程操控,藉由主僕式的控制結構將醫師動作縮小至病灶處,並消除不必要的顫動。雖然這些方法在臨床和商業上都取得了成功,但由於成本高、物體佔地面積大和設置時間長,這些機器人的使用率仍然有待努力。最近,研究人員轉向開發完全不接地、由醫生直接在自由空間中操作的手持機器人。
相較於落地型機器人的笨重與昂貴,現在研發的重點在於將手術機器人縮小,結合傳統外科手術工具,允許醫師以使用傳統器械的方式操作機器人。因為機器人體積縮減,建置成本因此得以降低、不受限於特定環境中、增加應用的多元及靈活性;而且由於機器人微小化,術前的設置及滅菌程序所花費的時間亦可縮短。本文將對臺灣大學生物機電工程系顏炳郎教授團隊所開發之手持式脊椎手術機器人進行介紹。
二、脊椎手術機器人設計考量
脊柱自頭骨延伸至尾骨,共由 33 塊脊椎組成,為支撐身體、保護神經的重要結構,並可依所在部位不同,而分為頸椎、胸椎、腰椎等;雖然不同部位的脊椎尺寸與形狀相差甚大,但其基本結構是相同的:圓柱形的脊體位於前方,從頸部開始,其尺寸愈來愈大,以負擔隨脊椎向下而增加之身體重量;各節脊椎以椎間盤間隔,作為緩衝保護。椎體兩側後方延伸出椎弓,靠近椎體處為粗短圓柱狀之椎弓根 (pedicle),逐漸向後形成扁平結構之椎板,最後左右椎板在中線匯合。椎弓表面具有供肌肉及韌帶附著的突起結構,可作為槓桿推動那些固定並改變脊椎位置;其中,突向背側的棘突,可以在背部的正中線皮下處摸到。透過後方兩側的突起,得以和上下相鄰者形成關節,得以完成彎腰、後仰等動作。椎弓與椎體後壁的中空部位為椎管,在一節一節鉸鍊式的脊柱中,椎管縱向延伸為脊髓腔,其中容納中樞神經(脊髓);上下相鄰脊椎的椎弓根間會形成椎間孔,脊神經根從此穿出而分佈全身。
為了降低脊椎不穩定性、重建脊椎正常結構及避免神經壓迫,在治療受傷、腫瘤、變形或退化的脊椎手術中,經常會需要將支撐桿件等植入物固定在脊椎上,通過椎弓根鎖入螺絲 (稱為椎弓釘),以達到固定效果。如前所述,椎弓根週遭環繞肌肉及神經,而且螺絲之直徑和椎弓根直徑接近(胸椎及腰椎的椎弓根直徑約 4.5 到 18 mm),故如何評估椎弓釘放置位置並正確定位,是脊椎手術成功與否的重要考量。臨床上對椎弓釘放置準確度以 2 mm 為單位,分為 5 個評估等級:A 級為準確定位,即螺絲完全埋入椎弓根中;B 級表示螺絲雖然在椎弓根中,但有接觸到皮質壁,偏移量小於 2 mm;C 級的偏移量在 2-4 mm 間,如此類推。C 級以上即屬於誤植,可能會造成傷害。2 mm 的誤差在機械製造中是個很大的數值,但在手術中則是一個很困難的門檻,所以機器人的精準定位功能可以滿足這個需求。
在沒有電腦輔助技術之前,傳統的脊椎手術需要在後背處切開長約 10 到 15 公分的傷口,由淺至深地將表皮、皮下組織、肌肉、筋膜等組織切開剝離,以暴露出目標脊椎。手術中產生的大型傷口及大量出血,使得術後恢復期長,連帶拉長住院時間以及回診次數,而且容易會有神經沾黏等後遺症。所以,只要切開小傷口的經皮進行椎弓釘固定成為新的手術趨勢。這種植入技術係在手術中導入稱為 C 型臂 (C-arm) 的可移動式 X 光機,透過反復拍攝術中 X 光影像,持續對椎弓根及椎弓釘進行定位;在重複拍攝-手術操作-拍攝驗證的程序中,不斷確認醫師正確地將椎弓釘固定於椎弓之中,而未傷及週遭組織。雖然相較於開發手術,經皮手術的副作用大幅降低,但取而代之的是手術時間更長、難度更高以及輻射暴露的風險。
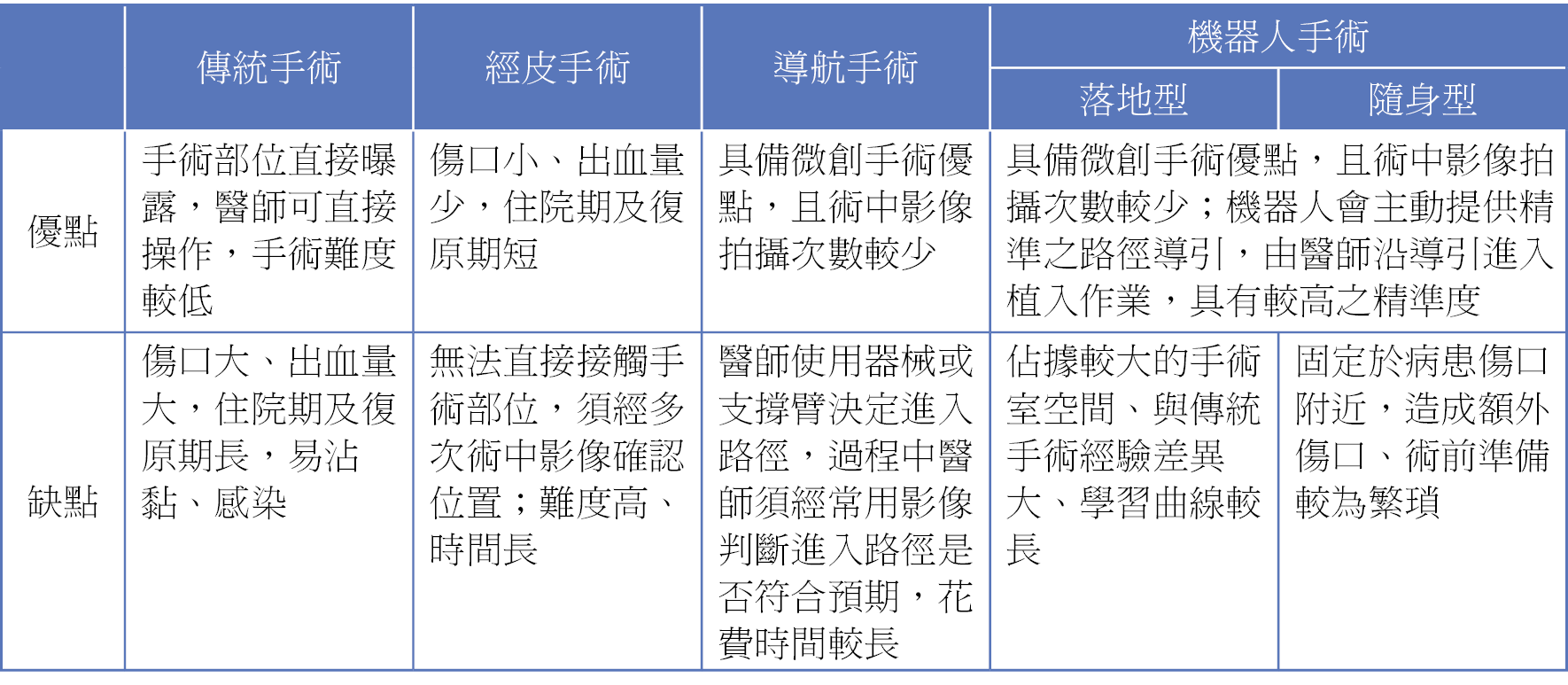
為了克服這些問題,各種手術輔助技術應運而生。Brainlab Cirq(1) 與 StealthStation(2) 為電腦導航系統,使用病患的影像作為視覺介面,通過定位標記來定位導管與病灶之相對空間關係,醫師可藉由視覺資訊隨時掌握手術現況。導航系統使用之支撐臂或特製之輔助器械上安裝有定位標記,用以提示不同姿態下對應的進入路徑;醫師可以透過鬆開/鎖固支撐臂上之各關節進行調整,再以此進行下鑽與鎖入椎弓螺絲之動作。因支撐臂上只有簡單機構,可隨意安裝於手術檯各處,使用上較為彈性;然而,該支撐臂上被動式設計,故無法即時針對目標路徑進行補償。有別於被動提供影像資訊的電腦輔助系統,機器人手術系統則提供主動協助。早期應用於脊椎手術的機器人為 Mazor 的 SpineAssist(3) 與第二代系統 Renaissance®(4),其係將一並聯式機器手臂安裝於病患身上,藉由術前、術中影像擬合以計算機器人與病灶間相對位置,機器人得以將手術器械導管自動對位至事先規劃的手術路徑上,最後由醫師操作手術器械沿導管進行下鑽與植入椎弓螺絲。由於機器人為直接固定於病患背部,故大幅縮小了整個系統需佔據的手術空間,但也造成了額外的傷口。不過最常見的手術機器人仍為落地式 (架設於台車、病床) 串聯式機器手臂,如 Rosa Spine(5)、Excelsius GPS(6)、Mazor X(7)。Rosa Spine 將導管進行對位後植入克氏針 (K-wire),並沿 K-wire 導引植入椎弓螺絲;Excelsius GPS 與 Mazor X 則不需要 K-wire 輔助,直接沿導管導引進行下鑽與所入椎弓螺絲。然而使用上述機器人輔助系統與傳統手術經驗相差較大,醫師除了學習過程較長外,術前的機器人準備動作也較為繁瑣,故其手術時間與傳統手術相比並無相去多少甚至有所增加。表 1 整理了傳統手術、經皮手術及機器人手術的優缺點。
表 1. 傳統手術、經皮手術及機器人手術的優缺點。
顏教授團隊所開發之手術機器人整體架構如圖 1 所示,結合手持式機器人系統與泛用型醫療影像軟體平臺,提供醫師術前規劃、術中即時追蹤導引及機器人自動對位功能。軟體平臺參考一般醫療影像應用,提供三個截面與 3D 重建模型,供醫師選擇適當大小椎弓釘及規劃最佳植入路徑。術中導引則會在手術中引導醫師進行擬合動作,並提供手持機器人與植入路徑間之空間關係,提示醫師如何移動機器人到達手術路徑附近。手術機器人則以並聯式機器人作為核心,搭配多項感測器 (如光學定位、力量感測器、慣性感測器等),可於手術過程進行即時偵測。除了電腦計算之病灶與手術器具的關係外,當進入機器人最佳作動範圍後,即可透過機器人主動補償,使手術器具在正確的手術路徑作動,減少醫師操作過程中因手震造成之誤差、以及針具於組織間產生的偏移。同時,手術過程有多項感測器能夠即時進行偵測並將資料分析並做出決策,醫生的手術過程也能予以量化。
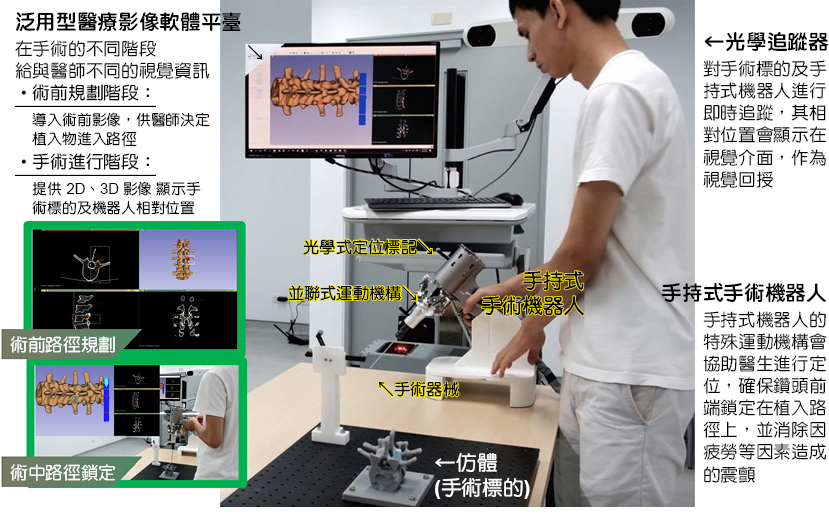
圖 1. 手持機器人的整體系統。
三、手術機器人使用之技術特點
完整的手術機器人運作流程包含以下步驟,整體流程如圖 2 所示:
‧術前規劃:提供術前診斷用電腦斷層影像,包含各方向之 2D 截面和 3D 重建模型,醫師可依習慣在熟悉的影像介面上,根據病患的骨頭解剖結構,決定椎弓釘之類型、尺寸以及合適之植入位置,作為手術進行之依據。
‧術中執行:手術過程中,醫生根據電腦導航畫面,將機器人移動到植入路徑附近,機器人的前端會協助醫生進行定位,使鑽頭前端能鎖定在植入路徑上,達到更安全、精準且快速的定位。當機器人植入點且角度都調整正確時,醫生可以進行下鑽,下鑽的同時電腦導航系統也會輔助提醒醫生是否須修正目前的植入方向,當到達預期的植入深度時會提醒醫生。
‧術後驗證:重新拍攝影像,評估椎弓釘植入結果,驗證路徑是否正確。
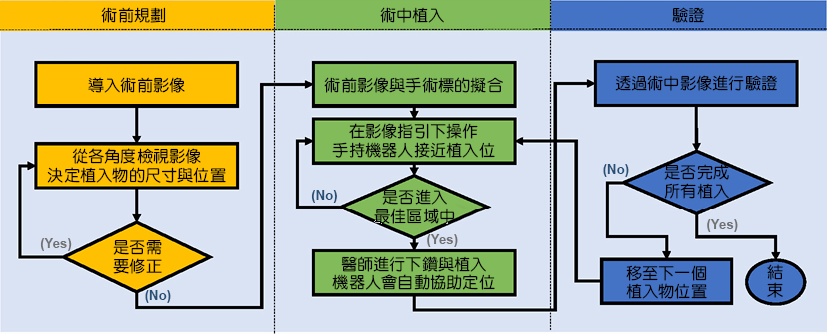
圖 2. 手持機器人運作流程。
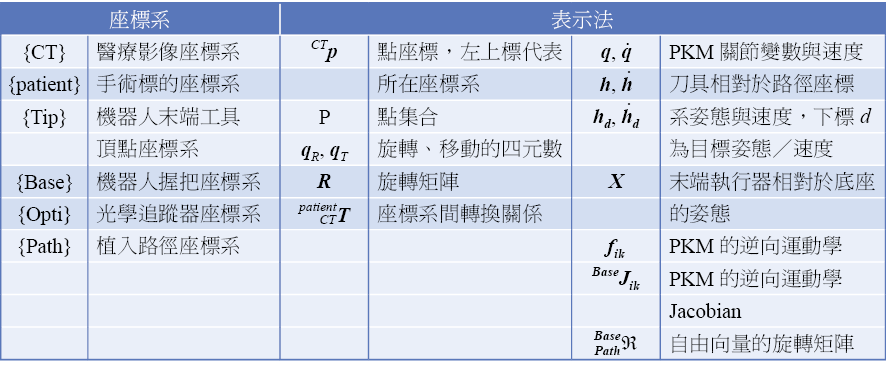
運作流程中會涉及手術部位、醫療影像及手術機器人等多個子系統,其間的座標轉換關係展示於圖 3。接下來將介紹各種手術機器人使用之技術特點,用到的符號則統一列於表 2。
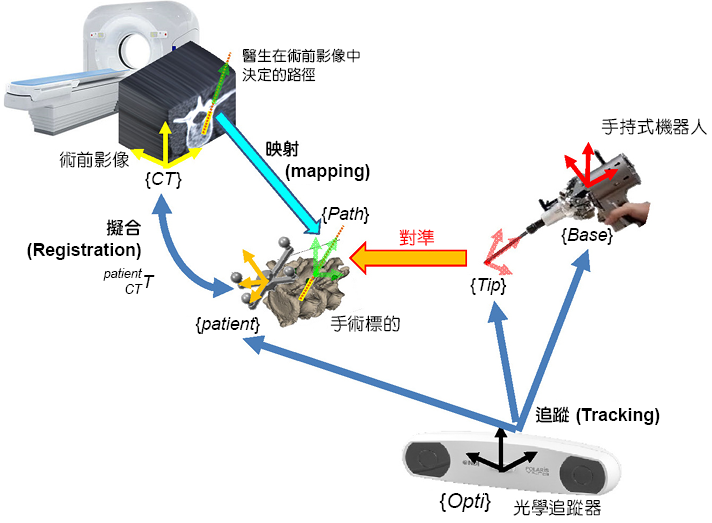
圖 3. 座標系轉換關係。
表 2. 本文使用之符號。
1. 手術部位、醫療影像與機器人座標系之擬合
機器人輔助手術中的重要步驟之一是透過擬合 (registration) 功能來建立病患、手術模型 (術前影像) 與機器人間之空間關係。這個步驟能直接影響椎弓釘定位精準度,如果擬合的誤差度過大,將導致過大的手術誤差。
擬合的效用在於將病人的術前脊椎的電腦斷層 (CT) 影像與實際病灶疊合,作為手術中的「地圖」,並使手術機器人所在位置得以即時顯示其上,讓醫師隨時可以清楚了解機器人和病灶間的相對位置;同時,機器人得以將醫師在術前影像中規劃之植入路徑,映射到實際手術部位,作為作動依據。
如果寫成數學式,即令術前電腦斷層影像中之任意點座標 CTp = [CTx CTy CTz]T 和病灶上的對應點 patientpp = [patientx patienty patientz]T 滿足:

其中 ε 為一可接受之誤差值。而轉換模型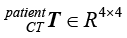 即為兩座標系間之關係。相較於一般手術中,軟組織會因為各種操作產生形變;脊椎在手術過程中,形體不太會發生改變,座標系的轉換模型只需要考慮剛性的旋轉與平移。
即為兩座標系間之關係。相較於一般手術中,軟組織會因為各種操作產生形變;脊椎在手術過程中,形體不太會發生改變,座標系的轉換模型只需要考慮剛性的旋轉與平移。
本系統採用的方法是曲面對應法,此法係以 Besl 和 McKay 迭代最近點演算法 (iterative closest point, ICP)(8) 為基礎,對於一組有限點集合描述之測量影像 (measure data),透過在使用大量點集合描述之目標影像 (model data) 中,找尋離測量影像距離最近之集合作為旋轉平移模板,以迭代方式找到最終轉換方式。然而 ICP 演算法最終收斂的結果,並不一定是全域最佳值,而可能是區域最佳值。為了改善此問題,本系統在進行 ICP 擬合之前,會先在術前影像的脊椎模型中點選四個特徵點,然後利用定位儀器在病患的脊椎上量測出相同對應點的位置;透過這四組對應點,可求出一個初始的轉換矩陣,將兩組座標系移至接近的位置,再透過 ICP 演算法可求得最佳的座標轉換關係。
病人的電腦斷層影像會經過重建,根據影像的灰階值 (Hounsfield 單位) 將病灶與周遭組織分離,然後將表面起伏轉換成三角網格形式(9)。所有網格點組成之集合記作 CTp = {CTpi},i = 1, ... NCT。在脊椎導航手術中,醫師會在病灶周遭裝設參考標記;操作定位探針沿脊椎表面移動,立體追蹤系統會計算探針相對參考標記的相對位置,以取得特徵之座標數據。得到之量測點集合記作:patientp = {patientpi}, i = 1, ... Npatient。
Horn 等人(10) 於 1987 年提出可以使用四元數 (quaternion) 描述兩個具有相同空間關係、但具有不同座標資訊之系統間之旋轉平移關係。若影像網格點集合與量測點集合的點數同樣為 n (即 NCT = Npatient = n),其質心可以記作 uCT 及 up

兩者間的共變異矩陣

其中的上標 t 表示矩陣的轉置。令 Aij = (Σpx − Σtpx)ij 且 Δ = [A23 A31 A12]t,則可定義出矩陣 Q(Σpx)

矩陣 Q(Σpx) 進行特徵值分解,所得之最大特徵向量即代表

則模型點集合與量測點集合間的旋轉矩陣為

平移向量則可由 qT = up − R(qR)uCT 求出。經過四元數運算後,模型點集合與量測點集合間之誤差以對應點間距離的均方值呈現

然而,使用四元數建立兩組點集合間的空間關係的先決條件是兩者的點數與點序必須相符。但實際狀況中,量測點集合取決於醫師實際操作,其點序與點數與不可能和模型點集合相同。此時即需使用由 Besl 提出之迭代最近點演算法對兩組不同大小的點集合建立彼此之關聯性(8)。ICP 會對量測點集合 patientP 的每一個元素點在模型點集合中找到對應點,組成一個數目與點序皆與量測點集合相同之新集合  。完整的擬合演算法流程如圖 4,先在模型點集合中找出對應每個量測點的集合 ,然後對兩者進行四元數運算。若四元數產生的均方誤差與前一輪的誤差的差異值小於設定的閾值,則演算法終止;若否,則將旋轉平移後的量測點集合 qK(p0) 作為新的 pk 值,開始下一輪的演算法。
。完整的擬合演算法流程如圖 4,先在模型點集合中找出對應每個量測點的集合 ,然後對兩者進行四元數運算。若四元數產生的均方誤差與前一輪的誤差的差異值小於設定的閾值,則演算法終止;若否,則將旋轉平移後的量測點集合 qK(p0) 作為新的 pk 值,開始下一輪的演算法。
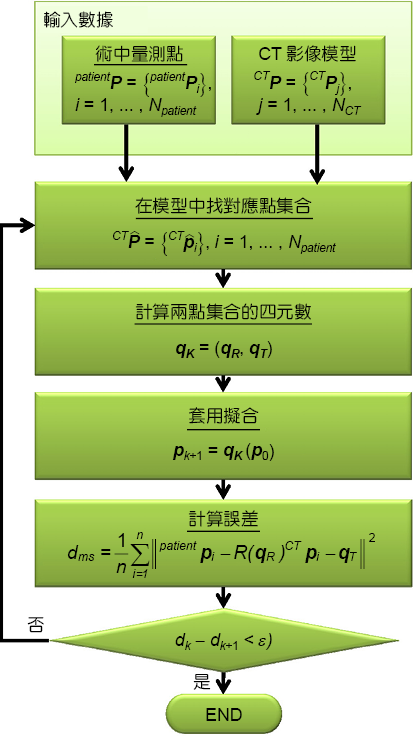
圖 4 .基於 ICP 的擬合演算法流程圖。
2. 具有並聯機構的主從式手持手術機器人
醫療影像導引是電腦輔助的基本功能,具有並聯式機構的手持機器人才是本系統的技術亮點。手持手術機器人的外觀類似於傳統的鑽孔工具,由外科醫生握在手柄上並指向目標。在把手處和手術工具中間內嵌了一組並聯式運動機構 (parallel kinematic machines, PKM),這是一種特殊的機械結構,稱為「slave on the master」,即將從屬機器人的底座固定在主控端的把手上。由於和傳統的手術設備具有相似的幾何結構,故醫師可以在不改變操作習慣的前提下,同時享有機器人提供的額外功效,例如震顫抑制、主動引導 (位置和/或力量) 和力反射/放大。
本系統之手持機器人的直徑約為 8 公分、長約 25 公分,總重量約 1.5 公斤。考量到消毒便利性,機器人採取模組化結構,由末端執行器 (手術工具)、具被動連桿和線性驅動裝置三部分組成。線性驅動模塊是手持機器人體積與重量的主要來源,包含六顆線性馬達和對應線性機構,可以獨立驅動的被動連桿中任一桿件進行直線運動。被動連桿採取並聯的閉鎖式對稱結構,提供末端工具 6 自由度的工作空間,使得末端的手術工具可以同時由多個連桿支撐和驅動,將重量平均分散至把手上,在小體積 (重量) 的情況下承受高度負載或剛度,確保末端手術執行器在穿透骨骼時有最小的形變。
圖 5. 手持機器人的模組化結構。
對於此種並聯式手持機器人的控制採取的是軸關節速率控制 (resolved-motion rate control),即在滿足動作限制條件下計算對應的各軸運動狀況。對於手術機器人而言,手術工具將永遠指向目標路徑,是以當手術工具頂端和目標路徑有誤差時,控制器會去計算各軸關節所需要的速度以進行補償。
在此將目標路徑定義為座標系 {Path} 的 Z 軸,並將手術工具頂端相對座標系 {Path} 的姿態寫為 h

其中,(x y z)T 為平移誤差,(α β γ)T 為尤拉角之方向誤差。為了簡化符號,沒有上標的姿態變量皆對應於參考座標系 {Path}。然後,各軸關節速度與手術工具速度的關係如下:

X 是末端執行器相對於底座的姿態、q 為關節變數,而 fik 表示 PKM 的逆向運動學。對上式進行微分,則可以描述 {Path} 座標系中的速率為

其中,BaseJik 為使用底座座標系 {Base} 描述的 PKM 逆向運動學雅可比矩陣 (Jacobian matrix),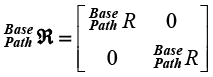 為自由向量的旋轉矩陣,而
為自由向量的旋轉矩陣,而  為 6 個關節的速度向量。手術工具的目標姿態 hd 永遠指向 Z 軸 (圖 6(a)),並將其動作限制於沿著該軸作動,是以只要對 {Path} 座標系的 X 軸與 Y 軸加以限制,即使得參數 xd、yd、αd、βd 皆為零;而在 Z 軸上的移動及對 Z 軸的旋轉則不予以約束,作為冗餘自由度存在。故目標姿態 hd 可以寫作
為 6 個關節的速度向量。手術工具的目標姿態 hd 永遠指向 Z 軸 (圖 6(a)),並將其動作限制於沿著該軸作動,是以只要對 {Path} 座標系的 X 軸與 Y 軸加以限制,即使得參數 xd、yd、αd、βd 皆為零;而在 Z 軸上的移動及對 Z 軸的旋轉則不予以約束,作為冗餘自由度存在。故目標姿態 hd 可以寫作

冗餘自由度存在則可於最佳化求解使用:設定 Z = z0,確保在具有最大 XY 面積之最佳工作平面上運作 (圖 6(b)),使得醫師在操作時有足夠的控制空間;同樣可以挑選合適之 γd 角,使得對每個向量 [x y z α β)]T 而言,具有最小的馬達驅動動能,其具體內容會在後面解釋。
一旦確定了所需的  ,就可以從使用位置基準的視覺伺服控制律獲得所需的刀具速度 :
,就可以從使用位置基準的視覺伺服控制律獲得所需的刀具速度 :

其中,K 為 PKM 影像伺服的增益矩陣。
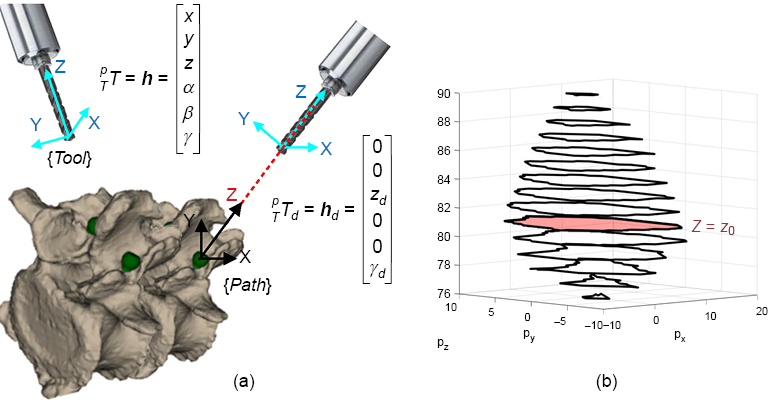
圖 6. (a) 手術工具的目標姿態 hd 永遠指向 Z 軸 (b) 當 Z = z0 時,機器人工作空間具有最大 XY 平面面積。
3. 將人納入控制迴圈
相較於完全自動化的手術機器人,目前認為比較安全的做法是由醫師操作機器人進行手術,並隨時進行安全監控;因此在建立手術機器人的控制架構時,必須將「人」納進控制迴圈中,即所謂的 human in the loop。
如圖 7 顯示,當醫師在術前影像引導下操作機器人進行手術時,會存在兩個視覺伺服迴圈 (visual servo loop):醫師根據影像導引介面所顯示的位置資訊,調整手持機器人的位置、機器人的定位性能響應則是根據光學跟踪器追踪工具表面與病灶解剖結構周遭光學標記間之距離,修正機器人姿態。這兩個迴圈都會透過視覺資訊估算工具與目標之間的相對距離,同時從機器人手柄和末端執行器進行控制,因而會互相干擾,產生競合現象。
圖 7. 當醫師操作手術機器人時存在兩個視覺伺服迴圈。
本系統使用協同控制 (share control) 為人與機器人在工具定位過程中,定義了兩個不同的工作,對兩個伺服迴路進行優化協調:(1) 通過特別設計的導引介面,對機器人手柄進行追蹤,並引導醫師將機器人的底座放置在一個預先定義最佳區域內,再 (2) 由機器人使用關節速率控制,將手術工具對準目標植入路徑。協同控制使得醫師與機器人兩者可以在自己迴圈的進行補償操作,又能接力完成手術工具的定位工作。圖 8 是協同控制的系統架構圖。
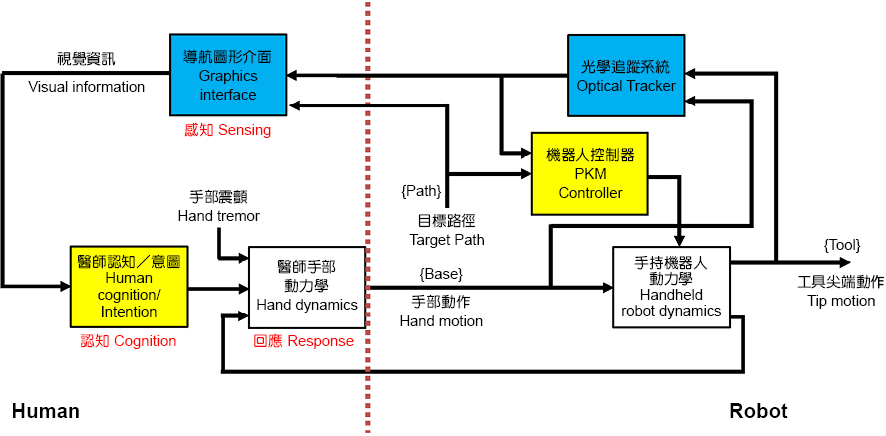
圖 8. 協同控制的系統架構圖(11)。
前述由導航軟體引導醫師將機器人把手放置於最佳區域的範圍,是設計在 PKM 可靈巧作動的工作空間中、而且當手術工具偏離目標時,操作者不會感受到機器人對應作動過程中所產生明顯的馬達反向碰撞力,即意味著在該區域中馬達輸出能量最小。馬達的輸出能量和速度絕對值 有關,而可表示成:
有關,而可表示成:
上式中, 為線性運算子的無限範數 (infnite norm),λmax(·) 為矩陣或機器人姿態函式的最大固有值 (eigenvalues)。於是在 K 已知的情況下,馬達動能和
為線性運算子的無限範數 (infnite norm),λmax(·) 為矩陣或機器人姿態函式的最大固有值 (eigenvalues)。於是在 K 已知的情況下,馬達動能和 的最大固有值及定位誤差 e 有關。PKM 的 Jacobian 直接影響糾錯過程中所有馬達的輸出能量;如果能夠適當選擇 γd 值,則可將擴大馬達最小輸出的範圍。若將馬達輸出以等高線形式畫出,並令滿足預設能量 λk 之水平線為 Γk:
的最大固有值及定位誤差 e 有關。PKM 的 Jacobian 直接影響糾錯過程中所有馬達的輸出能量;如果能夠適當選擇 γd 值,則可將擴大馬達最小輸出的範圍。若將馬達輸出以等高線形式畫出,並令滿足預設能量 λk 之水平線為 Γk:

在 Γk 範圍中,我們可以畫出一個內切圓,作為機器人導引邊界。
是以導航軟體介面最終會如圖 9 所示,包含重建之手術標的 (脊椎)、術前決定的椎弓釘植入路徑 (紅色圓柱),而手術工具會以綠色十字方式在介面中呈現。若當醫師操作把手進入最佳導引域中,則會顯示出黃色圓圈,此時機器人即會開始工作,將手術工具對正於目標路徑。
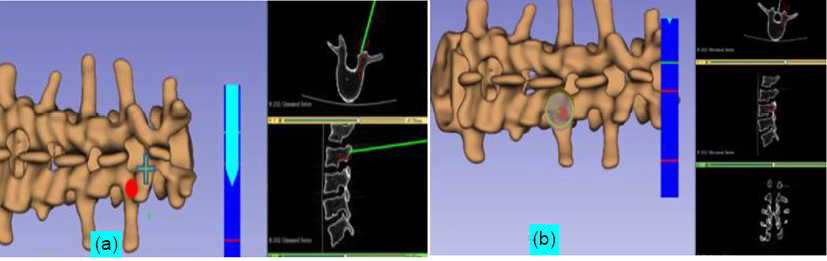
圖 9. 使用最佳區域的導航軟體介面。
四、實驗結果
1. 震顫抑制
圖 10 展示了兩組當醫師握住手持機器人對目標點進行瞄準過程中,把手 (藍點) 和手術工具末端 (紅點) 的軌跡變化(12)。結果顯示,手持機器人可以將醫師因產生之不自主手部顫動所產生之誤差 (X 軸向約 7-9 mm,Y 軸向約 2-3 mm) 補償至目標週遭 ±1 mm 範圍內。雖然外科醫師可以通過技能訓練和集中注意力來降低因精度不足、視覺反饋的低響應速度所造成的不必要動作,但在長時間工作後,仍然會因疲勞而產生不自主的顫動;因此,手持機器人可以通過對植入路徑的自主對正來緩解醫師壓力。
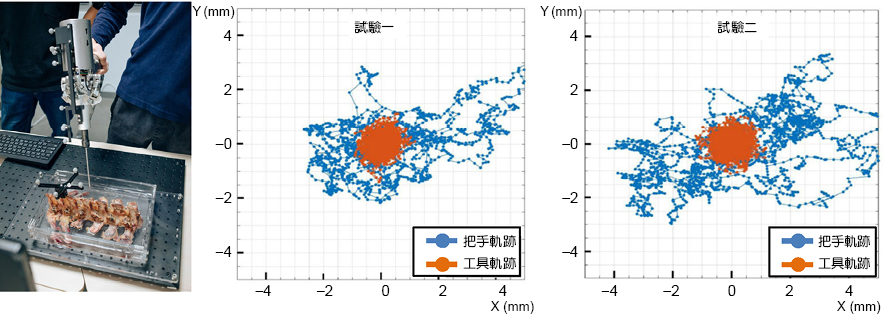
圖 10. 使用手持機器人對目標點進行瞄準過程中把手和工具的軌跡變化(12)。
2. 協同控制
圖 11 是在脊椎仿體中植入椎弓釘過程中,醫師握持把手 (黑線) 與手術工具 (藍線) 的移動軌跡(11)。當沒有在視覺導引介面中使用最佳導引範圍時,即兩個視覺伺服迴圈在競合狀況下,此時機器人把手和工具頂端在 X-Y 平面上,相對於目標路徑的誤差分別為 7.7 和 2 mm (rms);而顯示最佳導引範圍後,兩者的誤差分別降低至 1.7 和 0.8 mm (rms)。
圖 11(a) 係不使用最佳導引範圍而進行椎弓釘植入的軌跡圖,可以看到下鑽開始時,把手軌跡與工具頂端有較大的來回變動,此即為人和機器人同時對工具進行定位所產生的現象。由於醫師的手部動作通常比 PKM 動作慢,因此在人類完成定位之前,手術工具可能已經會通過 PKM 指向目標點,反因人的補償動作而導致刀尖產生過衝。所以如果只對手術工具進行導航,放任兩個視覺控制迴圈獨立動作,反而有可能會逐漸遠離目標路徑,甚至導致 PKM 到達工作空間邊界並在最壞的情況下卡住。相反地,藉由定義最佳導引範圍將人和機器人分配兩個單獨的任務,由醫師將機器人移至病灶週遭,再由 PKM 調整刀具方位直至指向目標,對彼此的行為進行互補,共同實現工具對正目標路徑
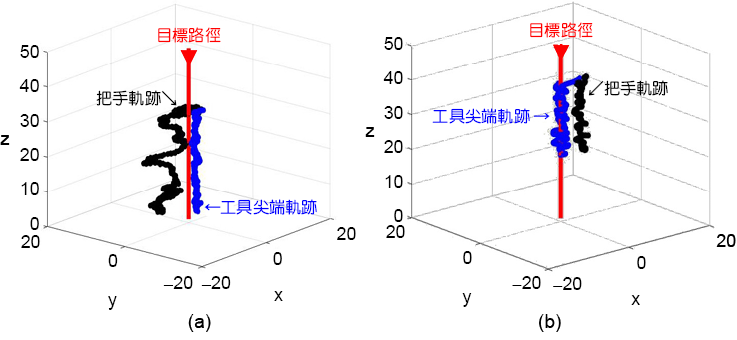
圖 11. 醫師使用手持機器人對目標點進行瞄準過程中把手和工具的軌跡變化。(a) 不使用最佳導引範圍 (b) 使用最佳導引範圍進行導引(11)。
五、結論
本文介紹了手持式機器人在脊椎微創手術的應用,提出了並聯式機構對刀具定位誤差自動補償,以消除手部震顫干擾進行精準定位;並使用協同控制策略來協調醫師和手術機器人兩個視覺伺服迴圈。藉由最佳工作範圍的劃定,操作者不易感受到馬達大幅度轉向所產生的作用/反作用力,故接下來的工作中,必須將考慮手術工具在通過軟組織與骨頭表面進行接觸時、以及穿透骨頭時所產生的力學訊號納進控制迴圈中,判斷刀具是否產生形變或在組織介面處發生打滑,以增加臨床的可用度。