整合溫度、濕度、微粒與無線通訊功能感測器模組於三維空間即時監控
A Wireless Temperature, Humidity, and Optical Aerosol Sensor System for Three-Dimensional Space Monitoring
大氣懸浮微粒 (PM),也稱為氣膠,是指懸浮在空氣中肉眼無法辨識之極微小固體顆粒。流行病學領域之相關研究顯示,環境中 PM 2.5 濃度對人類健康造成的不良影響已經引起人們相當大的關注。許多國家為保障公眾健康皆頒布了 PM 2.5 空氣品質標準,當中用來定義微粒之粒徑的方法也非常多元。本文將溫度、濕度以及光學氣膠感測器和無線傳輸模組作整合,開發出一種可攜式多感測器模組。將該開發模組置放於乾燥箱中利用溫濕計和雷射粒子計數器做測試,並透過最小平方法建立一迴歸方程式。監控模組則分別設置在乾燥箱之上層、中間層和底層,箱內濕度則控制在 20% 至 90% 之間,以監測光學氣溶膠感測器在各環境條件和空間維度下之性能。實驗結果顯示,光學氣溶膠感測器之計數數值隨著相對濕度的上升而增加,計數器之上層數值皆高於中間層和底層,而溫度對於粒子感測器沒有實質性的影響。
Atmospheric particulate matter (PM), also called aerosols, refers to solid particles or droplets suspended in the air. The existence of these particles cannot be easily detected by people because they are too small to be identified with the naked eyes. The concentration of ambient PM2.5 has been attracting considerable research attention because of its adverse effect on human health, as revealed by many epidemiological studies. To protect public health, PM2.5 air quality standards have been promulgated in many countries, and various measurement methods for defining the particle size exist. In this study, temperature, humidity, and optical aerosol sensors were integrated with a wireless transmission module for developing a portable multisensor monitoring module. The developed module was tested using a thermohygrometer and laser particle counter in a dry box to establish a regression equation by using the least squares method. To discuss the environmental condition and spatial dimension affect, the monitoring module was then placed in the bottom, middle, and upper layers of the dry box, and the relative humidity was controlled between 20% and 90% to monitor the performance of the optical aerosol sensor under various environmental conditions and spatial dimensions. Experimental results indicated that the aerosol count provided by the optical aerosol sensor increased with the relative humidity level. Temperature did not have a substantial effect on the particle sensor. The aerosol counter had a higher aerosol count in the upper layer than in the middle and bottom layers under various environmental conditions.
一、前言
PM2.5 係指在空氣中固體微粒尺寸小於或等於 2.5 mm 的懸浮微粒物質。近年來 PM2.5 指標偏高,其原因可歸咎於快速的工業發展與人口急遽增長所致。一般而言,懸浮微粒主要來源包含:海鹽飛沫、營建工地、道路揚塵、工廠鍋爐、火力發電廠燃煤、汽/機車引擎排放等。PM2.5 組成成份包括無機元素、水溶性礦物質(硝酸鹽、硫酸鹽、銨鹽)、揮發性有機物質 (VOC)、元素碳與有機碳等組成。PM2.5 易受到氣候條件影響 (溫度、濕度、大氣壓力、季風等)。當 PM2.5 濃度越高,其汙染程度越嚴重。根據研究顯示,懸浮微粒將損害呼吸系統與心血管系統,導致哮喘、肺癌與心血管等疾病發生(1-4)。為了減少空氣汙染對健康影響,世界衛生組織於 2005 年頒布空氣品質指南,用來界定懸浮顆粒物濃度(5)。一般測量懸浮微粒濃 度常見方法包括使用 b-gauge(6)、漸縮元件振盪微量天平 (TEOM)(7) 以及光學氣溶膠感測器。其中,使用 b-gauge 和 TEOM 兩種方法其需要繁瑣的採樣步驟,且操作員需先進行培訓與專業技術訓練才能熟悉此儀器。因此,該方法不能普及應用於一般大眾。市售常見的低成本空氣盒子 (AIR BOX),其原理係利用光散射理論,目前常見的感測器包括 Shinyei PPD42NS, Samyoung DSM501A, Plantower PMS3003 PM1.0 PM2.5 PM10 與 Sharp GP2Y1010AU0F 系列。此外,具備無線傳輸功能的感測器將成為未來進行大範圍監控的重要工具。因此利用聯網技術進行即時空氣質量監測已變得相當重要。目前在環保署的監測站中,係採用手動與自動兩種方法來監測空氣中的 PM2.5 濃度。但是這些方法系統性不同,需要經由數據比較、統計分析與校正才能實現數據一致性。根據環保署所訂定的空氣品質標準,PM2.5 數據監測是基於使用手動監測進行數據測量。建議測量精度超過 0.3 mm 的雷射光散射感測器應用於 PM2.5 檢測。雷射光散射感測器內部結構複雜,通常需要高效能的 CPU 與風扇推動空氣中懸浮微粒通過光源與接收器間的進行偵測。當通過雷射光時,空氣中的微粒子會產生散射和光衰減,藉此進行收集大量數據資料蒐集並進行懸浮微粒數量分析與計算。以下將針對文獻中提及的 PM 感測器校準與應用進行介紹。Manikonda 等人(8) 使用四台低成本 PM 感測器模組 (包括:Speck, Dylos, TSI AirAssure, and UB AirSense) 於實驗室中進行測試,所提案之實驗方法具備高空間與時間辨識 PM 濃度能力,並具有可攜式與低成本優勢。Wang 等人(9) 依據美國環境保護署空氣感測器研討會所提出的評估微粒感測器建議。測試六種微粒感測器效能,包含:響應的線性程度、量測精度、量測的限制條件、微粒的組成、微粒的尺寸等對於溫度/濕度的影響。Patel 等人(10) 使用低成本的無線 PM 感測器網絡進行室內 PM 濃度的時空測量。實驗結果表明,低成本 PM 感測器之性能與商用高成本 PM 感測器一樣有效。Olivares 與 Edwards(11) 開發並評估了用於室外粉塵信息節點 (ODIN) 的低成本環境粉塵感測器的性能。經由實際測試結果顯示,ODIN 數據資料可用於估算每小時與每日 PM2.5 濃度,作為室外活動指標。Holstius 等人(12) 提出可攜式低成本粉塵感測器進而補充現有基礎設施,增加測量涵蓋範圍與密度。根據實驗結果得知,其環境溫度與濕度影響可忽略不計。經由校正結果得知,每小時 PM2.5 數據之 R 線性校正足以解釋 1 小時參考 PM2.5 數據中 R2 為 60%,24 小時數據中 R2 為 72%。Rai 等人(13) 提出低成本與高密度佈建感測器來增加空氣汙染監測數據的準確度。測試結果顯示,感測器應於佈建過程與使用過程中需經常進行校準。同時,需考量感測器長時間使用下老化與製造的可變性。
本文將針對溫度感測器 (Aosong)、濕度感測器 (AM2302) 與 PM2.5 微粒感測器 (Plantower PMS5003) 與無線傳輸模組 (MediaTek LinkItTM Smart 7688) 整合,開發出可攜式多感測器監測模組。透過使用標準溫濕計 (Testo 635) 與雷射粒子計數器 (A2400) 在防潮箱中給予不同的溫度與濕度進行測試與校正,並採用最小平方法建立回歸方程式。最後再將感測器放置於防潮箱中的底層、中間層與上層,並在相對濕度 20% 至 90% 之間測試,進而瞭解 PM2.5 微粒感測器對於空間維度與不同溫濕度環境下的性能。
二、 具備無限傳輸功能之可攜式PM2.5 微粒感測器模組設計與製造 (整合溫度、濕度與 PM2.5 微粒感測器)
整合溫度、濕度與 PM2.5 微粒感測器之可攜式 PM2.5 微粒感測器模組。採用聯發科技(MediaTek LinkItTM Smart 7688) 無線通訊模組,作為可即時將感測器所蒐集之資訊回傳。其架構如圖 1 所示。整合溫度/濕度與 PM2.5 感測器模組設計,需考量實際在室內或室外的應用情境,加入溫濕度計輔以瞭解實際操作溫度,同時考量整體渦漩將外部粉塵導入至密閉的盒子中進行 PM2.5 的濃度與數量擷取同時,當監測濃度超過標準時將透過不同顏色燈號閃爍進行提醒。可攜式 PM2.5 微粒感測器模組其尺寸為 100 × 395 × 400 mm3,總重 500 公克。表 1 為溫度、濕度與 PM2.5 微粒感測器規格彙整。
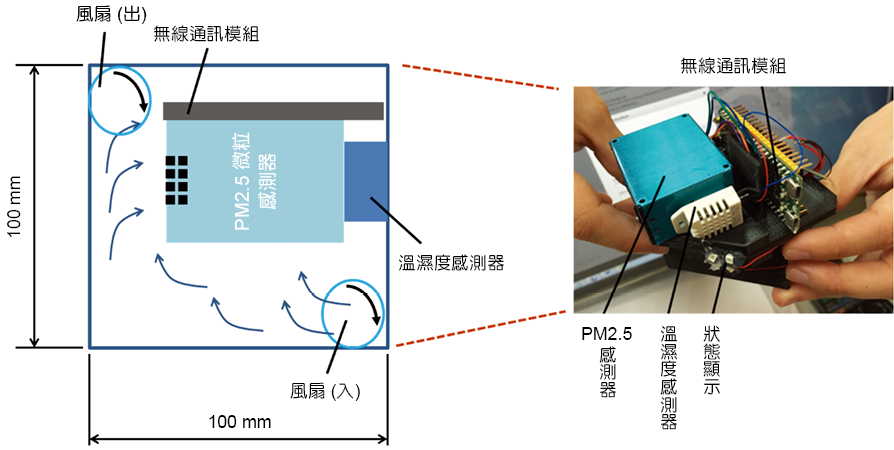
圖 1. 可攜式 PM2.5 微粒感測器模組整合溫度、濕度感測器。
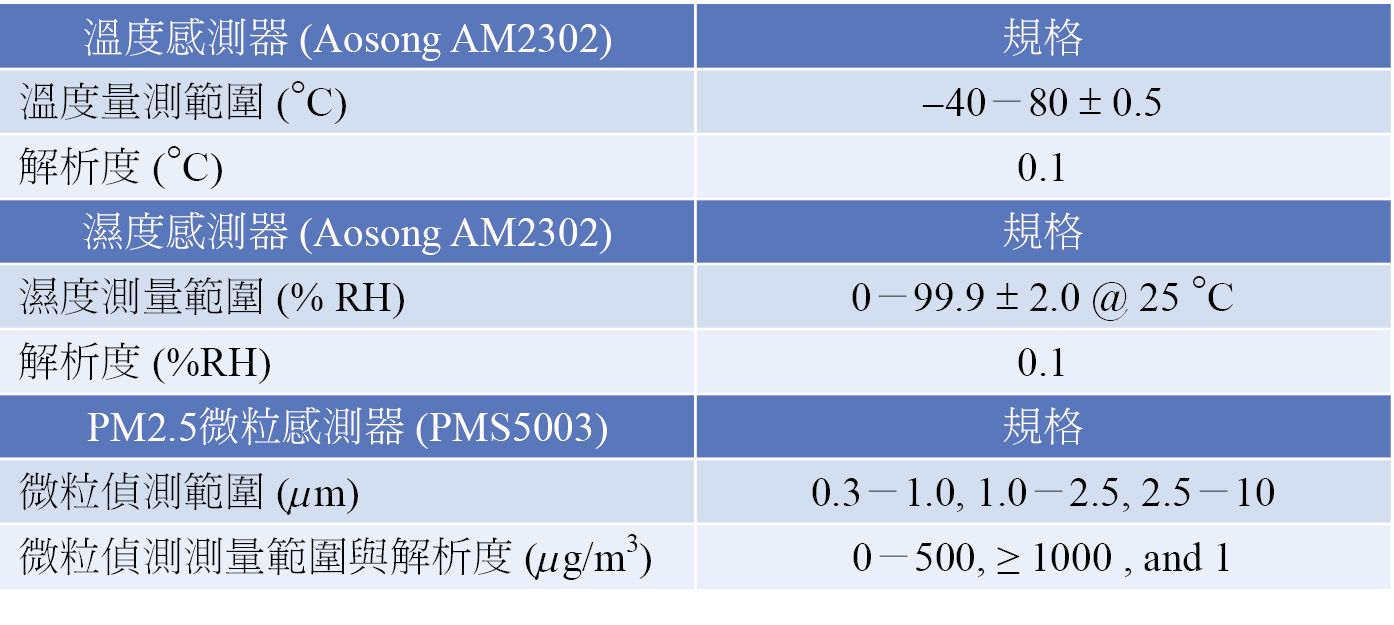
表 1. 溫度、濕度與 PM2.5 微粒感測器規格。
本文所開發之模組中,係將空氣中微粒導入,藉由 Mie 光學散射理論演算法(14) 進行不同粒徑數量量測與分析,其架構與原理,如圖 2 所示(15)。
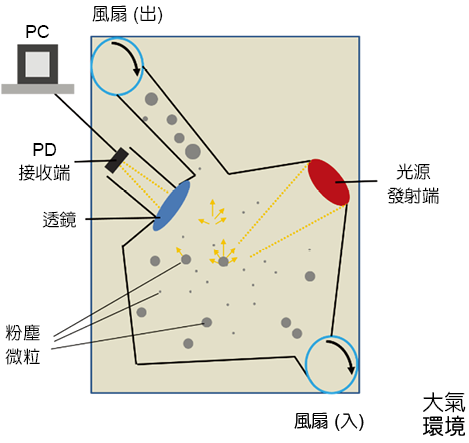
圖 2. 光學式 PM2.5 量測原理。
三、溫度/濕度感測器與 PM2.5 感測器校正方法
為獲得精確監測數值,將可攜式多功能模組放置在內部尺寸為 500 (長) × 395 (寬) × 400 (高) mm3 之乾燥箱中進行實驗。測試時間與取樣頻率分別設定為 5 分鐘與 1 秒。使用溫濕計 (Testo 635) 與雷射粒子計數器 (A2400) 作為標準進行測試,使用最小平方法建構迴歸方程式,用於感測器校正與數據轉換。為校正每個感測器測量誤差值,使用最小平方法確定軟體補償線性擬合方程式。圖 3 所示為不同取樣時間下測量值與其線性擬合方程式關係。將各誤差絕對值經由方程式 (1) 進行估算:
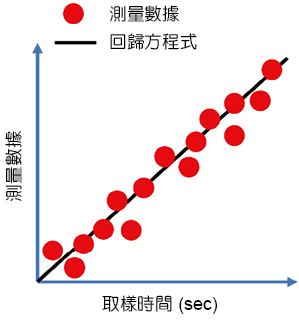
圖 3. 取樣時間與測量值間與迴歸函數關係曲線。

其中 yi 為實際測量值,y 為理想值。在軟體補償誤差後,預估總誤差平方值達最小,其最佳擬合函數可用方程式 (2) 表示:

其中 f(xi) 表示軟體補償值,xi 表示線性擬和函數。
四、PM2.5 感測器模組於三維空間內不同溫度與濕度條件下校正與量測
本章節介紹可攜式三維空間 PM2.5 監測裝置之設置。如圖 4 所示,各感測器分別設置在實驗用乾燥箱一個角落中 (上、中和下層) 以形成無線網絡區域。相對濕度控制在 20%-90% 之間,以勘測光學氣溶膠感測器在不同環境條件和空間維度下之工作性能。
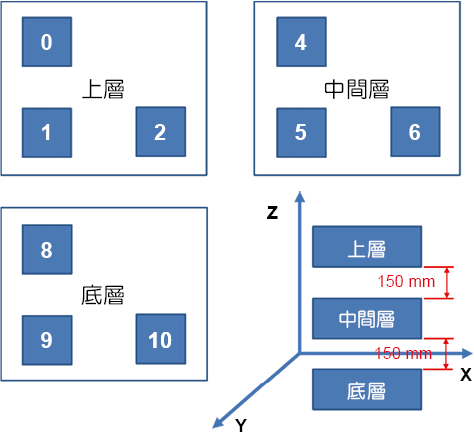
圖 4. 可攜式 PM2.5 感測器模組校正環境設置。
圖 5(a)-(c) 顯示出在不同維度空間與相對濕度情況下,PM2.5 感測器、溫度感測器與濕度感測器平均監測值。圖 5(a) 所示係討論 PM 2.5 濃度與濕度間關係。當濕度提高時,其 PM2.5 濃度也隨之增加。經由圖 5(b) 顯示實驗量測結果顯示,本研究所開發的感測器模組所量測得的 PM2.5 濃度與實際給予環境濕度與標準儀器所測得的結果相互比較成果,兩者幾乎沒有差異。在乾燥箱中間層與底層濃度僅在相對濕度 80%-100% 情況下,因濕度所產生蒸汽擴散漂移而略微降低。圖 5(c) 顯示在各測試層間平均溫度測量結果。由於溫度感測器受濕度干擾可能性較小,加上空氣擾動影響,導致最上層有最高溫度與中間層溫度最低的現象產生發生。
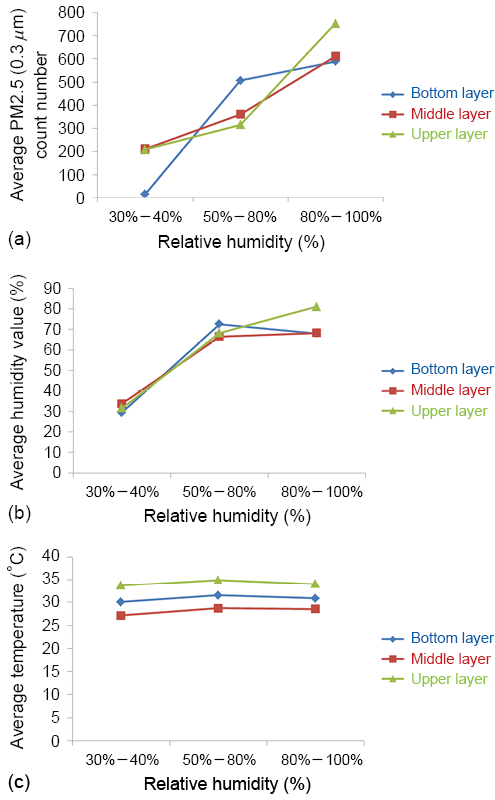
圖 5. 在不同空間條件下平均量測值:(a) PM2.5 粒子與相對濕度實際測量值、(b) 實際測量濕度與相對濕度關係與 (c) 實際測量溫度與相對濕度關係。
圖 6(a)-(c) 顯示三個不同空間維度所測量之數值 (如圖 (2) 所所示編號 2、標號 6 與編號 10 位置)。由圖 6(a) 可以看出,當相對濕度設定在 30%-40% 時,PM2.5 濃度只有些變動;當相對濕度設定在 50%-80% 時,由於空氣氣流擾動導致 PM2.5 濃度變化略為明顯;當相對濕度設定在 80%-100% 時,可發現 PM2.5 濃度有顯著地上升,上層濃度明顯高於中間層與底層。在乾燥箱內上層、中間層與底層平均濕度值可透過圖 6(b) 得知,其濕度值由高至低排列分別為:上層、中間層、底層。
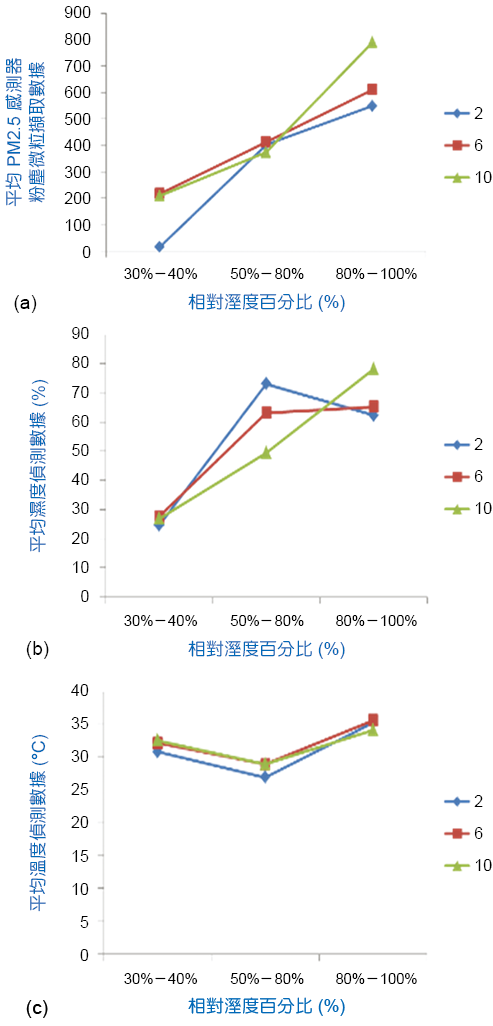
圖 6. 在不同空間條件下之平均監測值:(a) PM2.5粒子與相對濕度實際測量值、(b) 實際測量濕度與相對濕度關係與 (c) 實際測量溫度與相對濕度關係。
圖 7 顯示在相對濕度條件為 80%-100% 時,其 PM2.5 感測器在不同空間維度與相對濕度比較。其中,紅色標記為相對濕度,藍色標記表示 PM2.5 感測器量測後的微粒數量 (particle count number) 變化曲線,同時計算決定係數 (Correlation coefficient, R2)。圖 7(a) 係將感測器設置於底層,測量該層相對濕度與 PM 2.5 濃度變化情形。經由測量結果顯示,PM2.5 數值隨著取樣時間的增加而減小,但相對濕度並無顯著變化。底層 PM2.5 的 R2 值為 0.9063。圖 7(b) 係將感測器設置於中間層,測量該層相對濕度與 PM2.5 濃度。經由測量結果顯示,其 PM2.5 數值隨取樣時間增加而減小,而相對濕度隨採樣時間的增加而升高。中間層 PM2.5 的 R2 值為 0.9241。圖 7(c) 係將感測器設置於上層,測量相對濕度與 PM2.5 濃度。經由測量結果顯示,PM2.5 數值隨著取樣時間增加而顯著下降,此現象係由空間維度與下沉氣流所引起。上層中 PM2.5 的 R2 值為 0.5084。
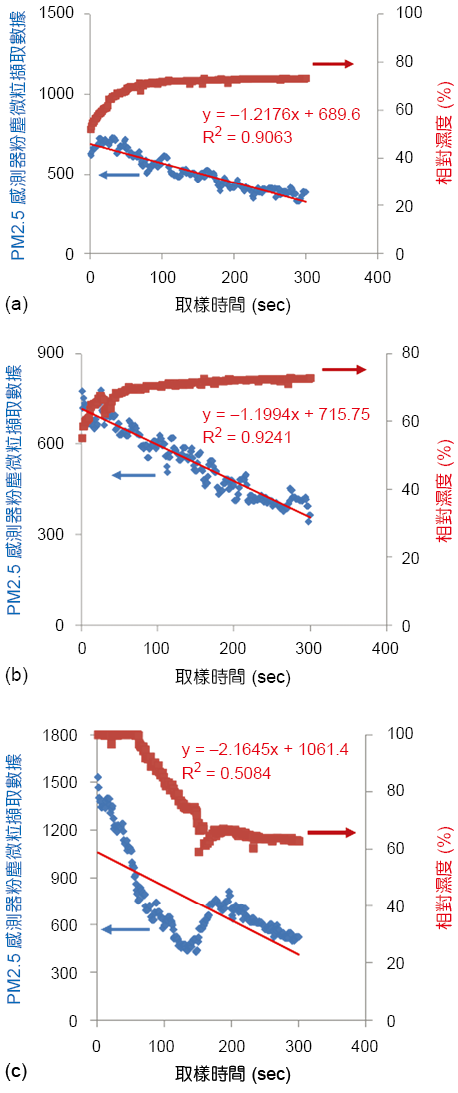
圖 7. 在不同空間條件下 PM2.5 粒子數與相對濕度關係:(a) 底層、(b) 中間層、(c) 上層。
五、結論
本研究成功完成溫度、濕度與 PM2.5 微粒感測器模組整合,並具備無線傳輸功能。同時應用於三維空間內在不同溫度與濕度環境下進行數據資料蒐集。經由實驗過程中,瞭解相對濕度與空間維度對於 PM2.5 感測器濃度之 R2 值。實驗結果顯示,在不同測試環境條件下,位於上層感測器 PM2.5 數值高於中間層與底層。
誌謝
感謝科技部 (MOST 106-2622-E-492-012) 提供研究經費上的支持。